To say rigidity, let's talk about stiffness first.
Stiffness refers to the ability of a material or structure to resist elastic deformation when stressed. It is a representation of the degree of difficulty in elastic deformation of materials or structures. The stiffness of a material is usually measured by the modulus of elasticity E. In the macroscopic elastic range, the stiffness is the proportional coefficient of the part load proportional to the displacement, that is, the force required to cause the unit displacement. Its reciprocal is called compliance, which is the displacement caused by unit force. The stiffness can be divided into static stiffness and dynamic stiffness.
The stiffness (k) of a structure refers to the ability of the elastomer to resist tensile deformation. k = P / δ, P is a constant force acting on the structure, and δ is a deformation due to the force.
The rotational stiffness (k) of the rotating structure is: k = M / θ ​​where M is the applied moment and θ is the angle of rotation.
For example, we know that the steel pipe is relatively hard, generally deformed by external force, and the rubber band is soft, and the deformation caused by the same force is relatively large. Then we say that the rigidity of the steel pipe is strong, the rigidity of the rubber band is weak, or Strong flexibility.
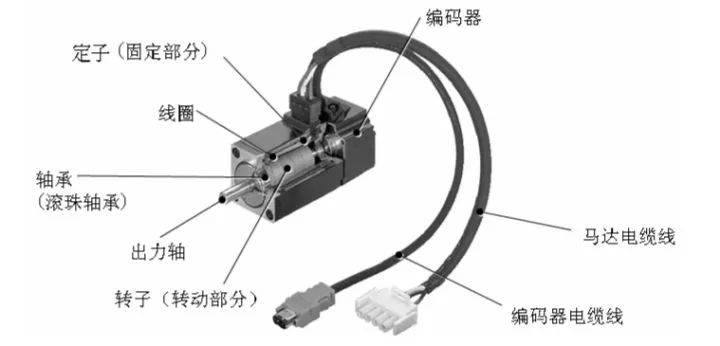
In servo motor applications, couplings are used to connect the motor to the load, which is a typical rigid connection. The use of timing belts or belts to connect the motor to the load is a typical flexible connection.
Motor rigidity is the ability of the motor shaft to resist external torque interference, and we can adjust the rigidity of the motor in the servo controller.
The mechanical stiffness of the servo motor is related to its response speed. Generally, the higher the rigidity, the higher the response speed. However, if the adjustment is too high, it is easy for the motor to generate mechanical resonance. Therefore, there are manual adjustments in the general servo amplifier parameters. The response frequency option is adjusted according to the mechanical resonance point, which takes time and experience (in fact, the gain parameter).
In the servo system position mode, the force is applied to deflect the motor. If the force is large and the deflection angle is small, the servo system is considered to be rigid, and vice versa. Note that the rigidity I am talking about here is actually closer to the concept of response speed. From the perspective of the controller, the stiffness is actually a combination of the speed loop, the position loop and the time integral constant, and its size determines the response speed of the machine.
Both Panasonic and Mitsubishi servos have automatic gain functions. Usually no special adjustments are required. Some domestic servos can only be adjusted manually.
In fact, if you do not require fast positioning, as long as the standard, when the resistance is not large, the rigidity is low, you can also achieve the positioning accuracy, but the positioning time is long. Because the rigidity is low, the positioning is slow, and in the case where the response is fast and the positioning time is short, there is an illusion that the positioning is not accurate.
The inertia describes the inertia of the motion of the object, and the moment of inertia is a measure of the inertia of the object about the axis. The moment of inertia is only related to the radius of rotation and the mass of the object. Generally, the load inertia exceeds 10 times the inertia of the motor rotor, and the inertia is considered to be large.
The moment of inertia of the guide rail and the lead screw has a great influence on the rigidity of the servo motor drive system. Under the fixed gain, the greater the moment of inertia, the greater the rigidity, the more likely the motor shakes; the smaller the moment of inertia, the smaller the rigidity, the more the motor is less likely to shake. . The motor can be shaken by replacing the smaller diameter guide rail and the lead screw to reduce the moment of inertia and reduce the load inertia.
We know that in the selection of the servo system, in addition to the parameters such as the torque and rated speed of the motor, we also need to calculate the inertia of the mechanical system converted to the motor shaft, and then according to the actual motion requirements of the machine and the quality of the workpiece. It is required to specifically select a motor with a suitable inertia size.
When debugging (in manual mode), setting the inertia ratio parameter correctly is a prerequisite for the best performance of the mechanical and servo system.
So what exactly is "inertia matching"?
In fact, it is not difficult to understand, according to the law of cattle two:
"Torque required for feed system = system moment of inertia J × angular acceleration θ
The angular acceleration θ affects the dynamic characteristics of the system. The smaller the θ is, the longer the time is issued by the controller until the system is executed, and the slower the system response. If θ changes, the system reaction will be slow and slow, affecting the processing accuracy.
The maximum output value is unchanged after the servo motor is selected. If the change in θ is small, J should be as small as possible.
On the above, the system moment of inertia J = the rotational inertia momentum of the servo motor JM + the load inertia momentum JL converted by the motor shaft.
The load inertia JL consists of the workbench and the clamps on the workbench and the inertia of the linear and rotary moving parts such as the workpiece, the screw, the coupling, etc., which are converted to the inertia of the motor shaft. JM is the rotor inertia of the servo motor. After the servo motor is selected, this value is fixed, and JL changes with the load such as the workpiece. If you want J to have a smaller rate of change, it is better to make JL a smaller percentage.
This is the “inertia match†in the popular sense.
Generally speaking, the motor with small inertia has good braking performance, and the reaction of starting and accelerating stops is fast, and the high-speed reciprocating property is good, which is suitable for some light load and high-speed positioning occasions. Medium and large inertia motors are suitable for applications with high loads and high stability requirements, such as some circular motion mechanisms and some machine tool industries.
Therefore, the servo motor is too rigid and insufficient in rigidity. Generally, the controller gain is adjusted to change the system response. The inertia is too large and the inertia is insufficient. It is a relative comparison between the inertia of the load and the inertia of the servo motor.
Perfect fit: The Hydrogel Screen Protector is designed with a Soft TPU material, which can be completely covered even on a curved device, providing perfect protection for the full coverage of the screen.
Oleophobic and waterproof: The use of hydrophobic and oleophobic screen coatings can prevent sweat, grease residue and fingerprints without reducing screen sensitivity. It is almost invisible on the screen and brings a high-definition visual experience.
Sensitive touch: ultra-thin and Soft Hydrogel Film with a thickness of only 0.14mm. As time goes by, it will self-repair minor scratches, provide you with a highly responsive screen protector and maintain the original touch.
Easy to install: The installation of the Protective Film is very simple, without air bubbles. The protective sticker can stay on the phone perfectly, and the bubbles will disappear within 24 hours.
If you want to know more about Hydrogel Screen Protector products, please click the product details to view the parameters, models, pictures, prices and other information about Hydrogel Screen Protective Film.
Whether you are a group or an individual, we will try our best to provide you with accurate and comprehensive information about the Hydrogel Protective Film!
Hydrogel TPU Protective Film,Ultra-Thin Protective Film,Soft Hydrogel Film,Hydrogel Film Screen Protector,Screen Protective Film,Mobile Phone Screen Guards
Shenzhen Jianjiantong Technology Co., Ltd. , https://www.jjtphonesticker.com